1 引言
Petri网是一种系统的、数学的和图形的描述和分析工具[1],随着超大规模集成电路FPGA和CPLD的发展,Petri网的硬件实现成为可能,而基于Petri网的逻辑控制器的逻辑电路实现方法成为最近几年的研究热点[2]。在目前的Petri网硬件实现的研究中,主要给出了petri网C/E系统和P/T系统的几种实现方法,但主要存在如下缺点:1)使用基本门电路和触发器用图形法自底向上实现了Petri网基本元件库所与变迁。这种设计方法的最大缺点是不易于任意修改逻辑电路设计。2)用VHDL语言实现了整体电路设计的软件化,但未形成模块化的Petri网元件。
VHDL语言由于其其强大的行为描述能力及与硬件行为无关的特性,被广泛的用于数字系统设计,实现了硬件电路设计的软件化,成为实现Petri网逻辑控制器的有力的工具。用VHDL语言进行数字电路设计的很大的优势是其自顶向下的设计方法,可以充分的实现电路的层次化设计,从而很方便的修改顶层的控制器电路。本文分别用VHDL语言研究了几种Petri网系统的硬件实现,包括同步PN、时延PN,尤其是高级网系统有色PN。在当前的研究中有色Petri网的硬件实现是一个难点。
2 同步Petri网的实现
2.1同步Petri网简介
定义1 [1]同步PN是一个三元组。其中
R是一已标识的PN
E是外界事件集
Sync是从R的变迁集到事件集的函数。
在同步PN中,每个变迁总是与一个事件相联系,当变迁是使能的,且与变迁联系的事件发生时,产生变迁的激发。
2.2同步Petri网的元件实现
元件P_M实现了基本的同步Petri网系统(如图1(a))中的库所模块,库所P具有两个输入变迁和两个输出变迁,且每个变迁均与外部事件有关。当库所P中没有托肯且库所P0或P1中有托肯时,外部事件E发生,变迁t0或t1激发,则托肯从库所P0或P1移动到库所P;当P中有托肯且库所P2或P3中没有托肯时,外部事件E发生,变迁t2或t3激发,则托肯从库所P移动到库所P2或P3;元件P_M(如图1(b))是在EDA软件Max+PlusⅡ中采用VHDL语言描述,经过编译、仿真后形成模块并存放与元件库中的。它有两个输入变迁in1,in2和两个输出变迁out1,out2,当变迁激发时,其值为逻辑1,否则为逻辑0;reset为复位信号,用来设置库所的初始状态。clk为全局时钟。P的值表示库所中是否含有托肯,若含有托肯,取值为逻辑1,否则为逻辑0。
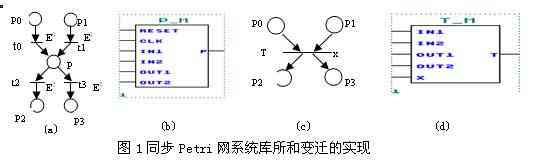
变迁元件T_M(如图1(d)),具有两个输入库所P0和P1,两个输出库所P2和P3,且受外部事件x的控制,如图1(c)所示,其激发规则是当库所P0和P1中有托肯,而库所P2和P3中没有托肯,且事件x发生时,变迁激发。变迁元件T_M 输入端in1,in2,out1,out2分别表示输入库所和输出库所中含有托肯的状态,若含有托肯,则取值为逻辑1,否则为逻辑0,x是外部事件。T表示变迁的激发状态,若可激发则取值为逻辑1。
用VHDL语言描述部分源程序如下:
architecture beh of t_m is
signal t0: std_logic;
begin t<=x and in1 and in2 and (not out1) and (not out2); end beh;
库所元件P_M和变迁元件T_M均存放在Max+PlusⅡ中建立的元件库中,是可以调用使用的。
3 时延Petri网的实现
3.1时延Petri网的定义
时延PN被用来描述其运行与时间有关的系统。主要有两种 时延PN和T时延PN。因二者是等效的,其中一个模型可以转换成另一个模型,故在此主要实现了T时延PN。 时延PN和T时延PN。因二者是等效的,其中一个模型可以转换成另一个模型,故在此主要实现了T时延PN。
定义2[1] T时延PN是二元组, 其中R是标识的PN;
Tempo是从变迁集T到非负有理数集的函数,Tempo(Tj)=dj是与变迁Tj相联系的时限,它规定了Petri网中的每一个变迁的持续时间。
在T时延PN中,每个变迁均有一为零或任一正实数的持续时间。而库所中没有持续时间,只要和它相连的变迁激发,库所就可失去或获得托肯。当变迁的输入库所中含有托肯时,变迁是使能的,但要真正激发需要经过一段持续时间。
3.2变迁时化Petri网元件的实现
T时延PN中库所元件与同步Petri网一致。
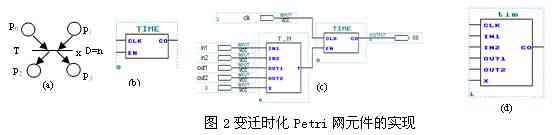
T时延PN中变迁元件的实现是在基本Petri网中变迁元件的基础上设计了一个计时器TIME,如图2(b),clk为计时频率,决定了计时的精度;en为其使能端,当变迁可激发时,en为1,计时器开始计时,计时结束时co输出为1。
在图2(a)中变迁T与时延D=n相连,当库所P0和P1中各有一个托肯时,变迁T获得发生权,但到T发生,需有n个单位的延时.调用元件T_M和计时元件TIME,建立逻辑电路如图2(c)示,并经过编译形成图2(d)所示逻辑模块时化变迁元件tim。
用VHDL语言实现计时器模块源程序如下:
if clkevent and clk="1" then
if en="1" then
if q="n" then q<=0;co<=1; else q<=q+1; co<=0; end if;
else q<=0; co<=0; end if; end if;
3.3变迁时化Petri网元件实现的应用举例
两台计算机使用一个公共存储器,如图3(a),假设每台计算机可以有三种状态 a)不需要该存储器;(b)需要存储器但还没有使用它;(c)正在使用存储器。 a)不需要该存储器;(b)需要存储器但还没有使用它;(c)正在使用存储器。

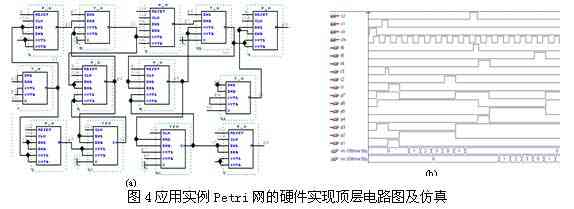
则对其建立Petri网模型如图3(b)示。各库所和变迁的含义解释为1,P4分别表示CP1、CP2发出需要该存储器请求 2、P5分别表示CP1、CP2占用该存储器3,P6分别表示CP1、CP2不需要该存储器7表示存储器;变迁中与时间相关的是T2、T5,分别表示cp占用存储器的时间。这是一个时延Petri网系统。分别调用元件库中所形成的库所元件、变迁元件和时延变迁元件,作出该系统的逻辑电路图如图4(a),并在EDA软件Max+PlusⅡ中对其编译、仿真下载,仿真波形如图4(b)示。 2、P5分别表示CP1、CP2占用该存储器3,P6分别表示CP1、CP2不需要该存储器7表示存储器;变迁中与时间相关的是T2、T5,分别表示cp占用存储器的时间。这是一个时延Petri网系统。分别调用元件库中所形成的库所元件、变迁元件和时延变迁元件,作出该系统的逻辑电路图如图4(a),并在EDA软件Max+PlusⅡ中对其编译、仿真下载,仿真波形如图4(b)示。
4 变迁时化有色Petri网CTPN的实现
4.1 CTPN网简介
CTPN={P, T, F, C, S, G}为变迁时间化的有色Petri网,其中,P 是一个有限的库所集合。库所包含有色托肯。
T 是一个有限的变迁集合。每个变迁均有一正实数的持续时间。一个激发颜色集与变迁相联系,其中每种颜色表明了一种激发的可能性。
F 是与变迁相联系的函数,表明了变迁激发后其输入弧和输出弧上信息的转换关系,若F为恒等函数,则省略不标。
C 是与库所相连的颜色的集合,C={C1,C2…Ci}。
4.2 CTPN网的元件实现
PROCESS进程是VHDL语言中最有特色的部分。在一个VHDL语言设计中,一个结构体中可以包括多个进程,而进程之间是并发的关系,同时又可以通过信号实现进程之间的联系。在有色Petri网的实现过程中,主要利用了vhdl语言中的进程语句process,根据库所中的颜色设置所需的进程,并将每一种颜色作为每一个相对应进程的敏感信号,而敏感信号的任何变化都可以启动进程的运行,当敏感信号不发生变化时,进程是挂起的,从而实现了有色Petri网中库所对不同颜色的识别。
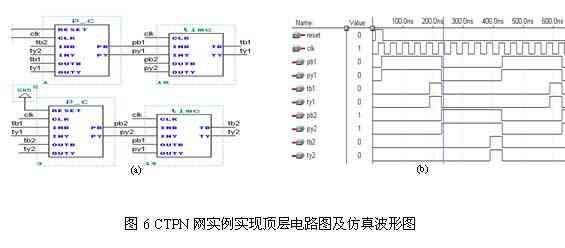
如图5(a)所示为一个简单的变迁时化有色petri网模型,具有颜色集{b,y},如果P1中有标记b(或y),则变迁T1对于颜色b(或y)是使能的,T1的激发包括从库所P1中移去一个标记b(或y),在P2中增加一个标记b(或y)。该模型的库所和变迁元件的实现如图5(b)、(c),其部分源程序为:
architecture beh of p_c is
begin
process(clk,reset,inb,outb)
…
end process;
process(clk,reset,iny,outy)
…
end process; … end beh;
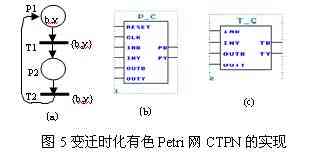
变迁元件T_C的实现是将同步PN网中的变迁根据激发颜色进行细化。将变迁元件T_C和计时器相连即可实现时化的有色变迁,在Max+PlusⅡ中形成可调用的时化变迁元件timc。
对图5(a)模型的硬件实现通过调用库所元件P_C和变迁元件T_C、timc实现,其实现的顶层元件图如图6(a)所示。并在Max+PlusⅡ中对其作仿真,波形图如图6(b)。
5 本文作者创新点
本文给出了几种Petri网系统的硬件实现方案,采用VHDL语言分模块实现,描述元件的功能并将元件存入WORK库中,使设计具有很强的可读性、可重复性、及可修改性,大大提高了系统的开发效率。
参考文献
[1] R. 大卫、H. 奥兰 著,黄建文、赵不贿译。佩特利网和逻辑控制器图形表示工具[M],北京:机械工业出版社,1996
[2]赵不贿,景亮,严仰光。Petri网的硬件实现[J],软件学报,2002(10):1652-1658
[3] Naehyuck Chang, Wook Hyun Kwon, Jaehyun Park. FPGA-based Implementation of Synchronous Petre Nets, Industrial Elecronics, Contorl and Instrumenation,1996,Proceed.
[4] 祝习兵,胡健生,黄金志。基于CPLD的基本Petri网系统的硬件实现[J],现代电子技术,2004(3):102-105
[5] 赵不贿,严仰光,陆继远,唐平. 控制电路基于Petri网的图形化设计与仿真研究[J],电路与系统学报,2005(5):54-58
[6] 沈宪明,白瑞林,章智慧. 基于FPGA的模糊CMAC网络的硬件实现[J]. 微计算机信息, 2006, 2-2: 基于FPGA的模糊CMAC网络的硬件实现 |






